“Rejected By My Own Robot” is a disobedient kissing robot which is activated when the user approaches. The mechanical lips will extend towards the user as they inch closer. But the kiss will never be consummated: move too quickly or get too close and the lips will quickly retract, ultimately rejecting the user every time.
This interactive art installation is a physical computing project I created as a part of my masters program at the Creative Computing Institute, University of the Arts London.
I think this interactive experience be interpreted in several ways. Some questions it raises for me personally:
- What value is there in technology being disobedient?
- What danger is there in our expectations that technology will always work “efficiently” and submit to our will?
- Can AI give consent? Does it need to?
The project is built using an Arduino to control several sensors and actuators, including:
- A couple distance sensors: one outside the box to detect an approaching user and one embedded within the mechanical lips to accurately detect the user’s “kissing distance”
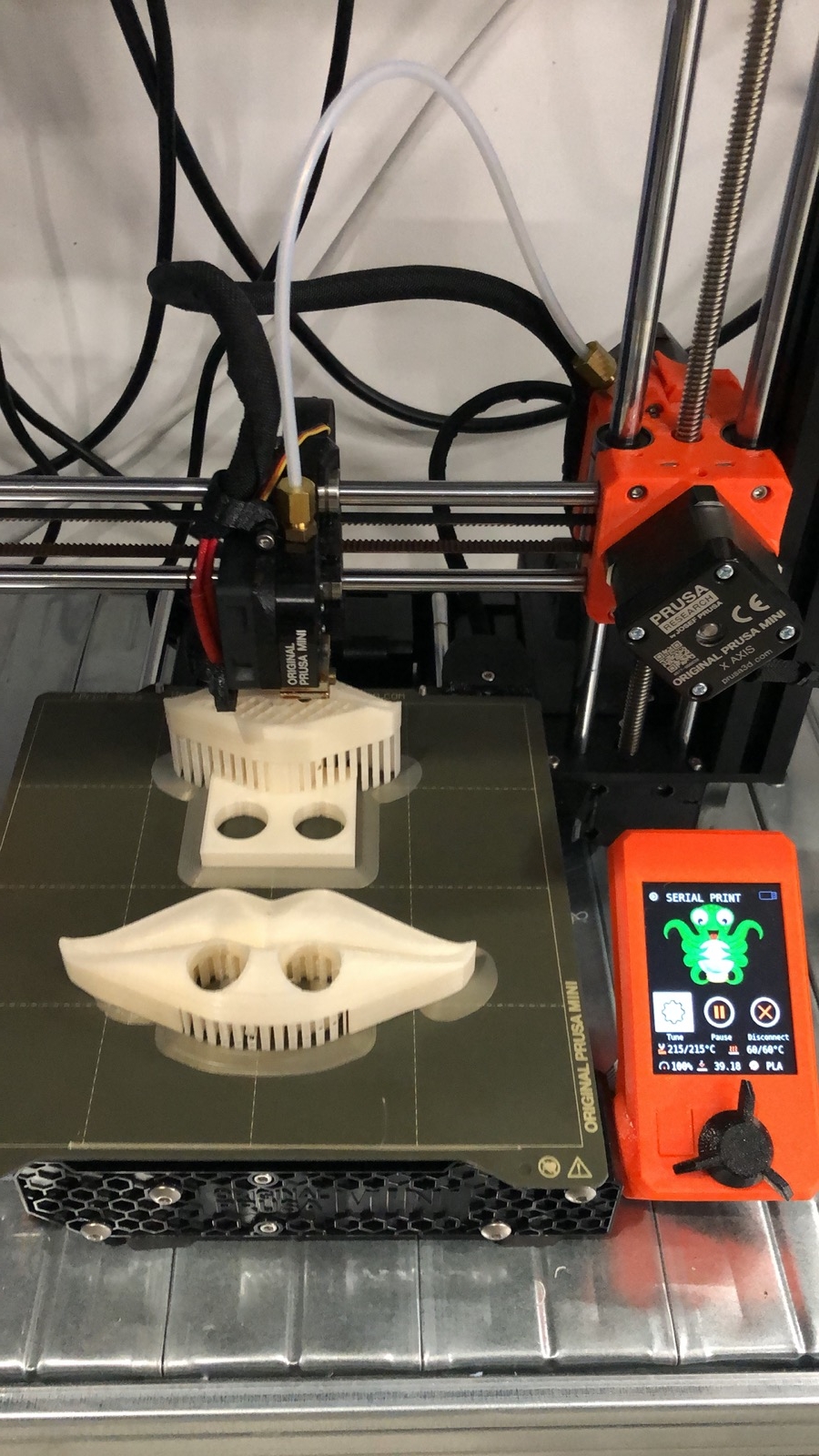
- A linear actuator consisting of a 3D printed gear and pinion system and a 360 servo (figuring out how to build a structurally sound linear actuator from 3D printed materials that could withstand the weight of the lips/sensor was one of the bigger challenges of the project)
- A couple standard servos controlling the “gates” of the robot lips which open and close when a person is near
- A strip of LED lights to indicate the status of the machine (idle, active, rejected)
The robot enclosure is constructed from mixed paper materials, 3D printed parts, lipstick, and magazine advertisements





/++