/inverse kinematics (1)
Encounter – Suspiciously curious robotics
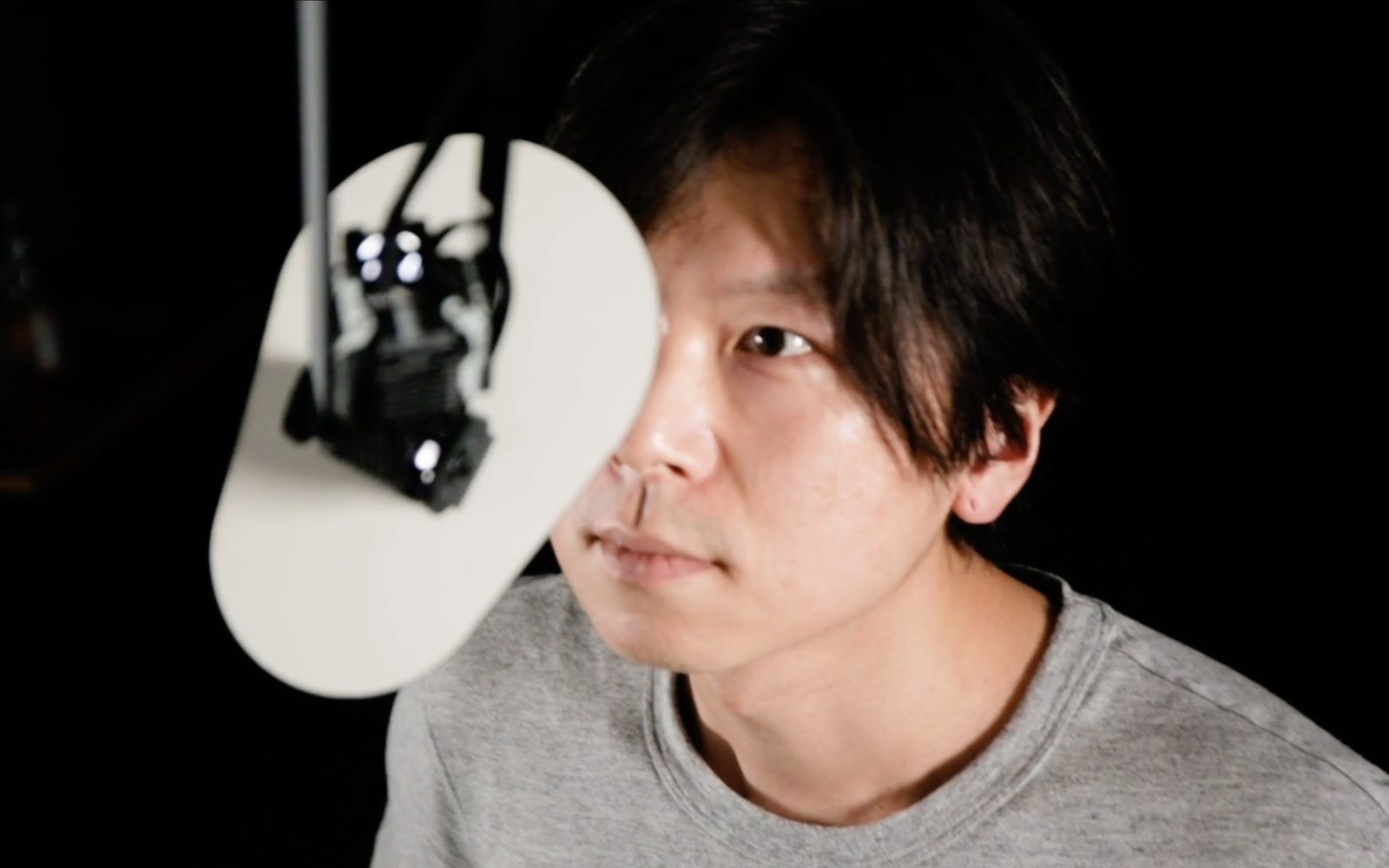
Created by Piet Schmidt during the summer semester at UdK Berlin (New Media / Digital Class), Encounter is a a robotic arm with a mirror that curiously observes its surroundings.
17/09/2018Created by Piet Schmidt during the summer semester at UdK Berlin (New Media / Digital Class), Encounter is a a robotic arm with a mirror that curiously observes its surroundings.
Category: Members / openFrameworks / Robotics
Tags: algorithm / automation / behaviour / curiosity / inverse kinematics / kinect / opencv / openFrameworks / robotics / sensing / servo / tracking / udk
Tags: algorithm / automation / behaviour / curiosity / inverse kinematics / kinect / opencv / openFrameworks / robotics / sensing / servo / tracking / udk